Continuous control with deep reinforcement learning
Abstract: We adapt the ideas underlying the success of Deep Q-Learning to the continuous action domain. We present an actor-critic, model-free algorithm based on the deterministic policy gradient that can operate over continuous action spaces. Using the same learning algorithm, network architecture and hyper-parameters, our algorithm robustly solves more than 20 simulated physics tasks, including classic problems such as cartpole swing-up, dexterous manipulation, legged locomotion and car driving. Our algorithm is able to find policies whose performance is competitive with those found by a planning algorithm with full access to the dynamics of the domain and its derivatives. We further demonstrate that for many of the tasks the algorithm can learn policies end-to-end: directly from raw pixel inputs.
Preview
Synopsis
Overview
- Keywords: Deep Reinforcement Learning, Continuous Control, Actor-Critic, Deterministic Policy Gradient, DDPG
- Objective: Develop a model-free, off-policy algorithm for continuous action spaces that leverages deep learning techniques.
- Hypothesis: The proposed algorithm can effectively learn policies in high-dimensional continuous action spaces, outperforming traditional methods.
Background
Preliminary Theories:
- Reinforcement Learning (RL): A framework where agents learn to make decisions by receiving rewards from the environment based on their actions.
- Actor-Critic Methods: A type of RL approach that combines value function approximation (critic) with policy optimization (actor).
- Deterministic Policy Gradient (DPG): An algorithm that optimizes policies directly in continuous action spaces, allowing for more efficient learning.
- Deep Q-Networks (DQN): A breakthrough in RL that utilizes deep learning to approximate the action-value function for discrete action spaces.
Prior Research:
- 2013: Introduction of DQN, demonstrating human-level performance in Atari games using raw pixel inputs.
- 2014: Development of DPG, which laid the groundwork for continuous action space learning but faced stability issues.
- 2015: Advances in actor-critic methods, including the introduction of batch normalization and target networks to stabilize learning.
Methodology
Key Ideas:
- Actor-Critic Architecture: Utilizes two neural networks, one for policy (actor) and one for value estimation (critic).
- Replay Buffer: Stores past experiences to break correlation in training data, improving sample efficiency.
- Target Networks: Slow-moving copies of the actor and critic networks that stabilize learning by providing consistent targets.
- Batch Normalization: Applied to normalize inputs across mini-batches, enhancing training stability and efficiency.
Experiments:
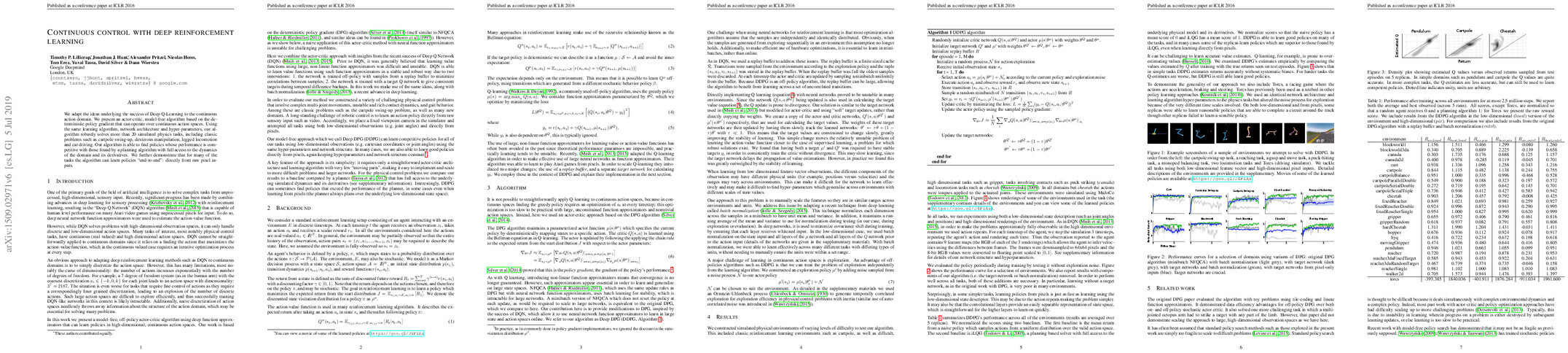
- Evaluated on a range of simulated environments including cartpole swing-up, dexterous manipulation, and legged locomotion.
- Used both low-dimensional state representations (e.g., joint angles) and high-dimensional pixel inputs.
- Metrics included normalized rewards and comparisons against a planning algorithm with full dynamics access.
Implications: The methodology allows for effective learning in complex environments, demonstrating the potential of deep learning in continuous control tasks.
Findings
Outcomes:
- The algorithm successfully learned competitive policies across various tasks, often outperforming traditional planning methods.
- Demonstrated the ability to learn directly from raw pixel inputs, showcasing the robustness of the approach.
- Achieved significant data efficiency, solving most tasks within 2.5 million steps, substantially fewer than DQN's requirements.
Significance: This research challenges the belief that actor-critic methods are too fragile for complex tasks, showing that with proper modifications, they can scale effectively.
Future Work: Suggested improvements include enhancing exploration strategies and integrating model-based components to further increase efficiency.
Potential Impact: Advancements in continuous control algorithms could lead to more capable robotic systems and applications in real-world scenarios requiring fine motor control and decision-making under uncertainty.