Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFs
Abstract: Deep Convolutional Neural Networks (DCNNs) have recently shown state of the art performance in high level vision tasks, such as image classification and object detection. This work brings together methods from DCNNs and probabilistic graphical models for addressing the task of pixel-level classification (also called "semantic image segmentation"). We show that responses at the final layer of DCNNs are not sufficiently localized for accurate object segmentation. This is due to the very invariance properties that make DCNNs good for high level tasks. We overcome this poor localization property of deep networks by combining the responses at the final DCNN layer with a fully connected Conditional Random Field (CRF). Qualitatively, our "DeepLab" system is able to localize segment boundaries at a level of accuracy which is beyond previous methods. Quantitatively, our method sets the new state-of-art at the PASCAL VOC-2012 semantic image segmentation task, reaching 71.6% IOU accuracy in the test set. We show how these results can be obtained efficiently: Careful network re-purposing and a novel application of the 'hole' algorithm from the wavelet community allow dense computation of neural net responses at 8 frames per second on a modern GPU.
Preview
Synopsis
Overview
- Keywords: Semantic segmentation, Deep Convolutional Neural Networks, Fully Connected CRFs, DeepLab, PASCAL VOC
- Objective: Combine Deep Convolutional Neural Networks (DCNNs) with Fully Connected Conditional Random Fields (CRFs) to improve semantic image segmentation.
- Hypothesis: The integration of DCNNs and CRFs will enhance localization accuracy in semantic segmentation tasks beyond the capabilities of DCNNs alone.
Background
Preliminary Theories:
- Deep Convolutional Neural Networks (DCNNs): Neural networks that utilize convolutional layers to extract features from images, effective in high-level vision tasks but struggle with precise localization due to pooling layers.
- Conditional Random Fields (CRFs): A type of probabilistic graphical model used for structured prediction, often employed to refine segmentation maps by modeling relationships between neighboring pixels.
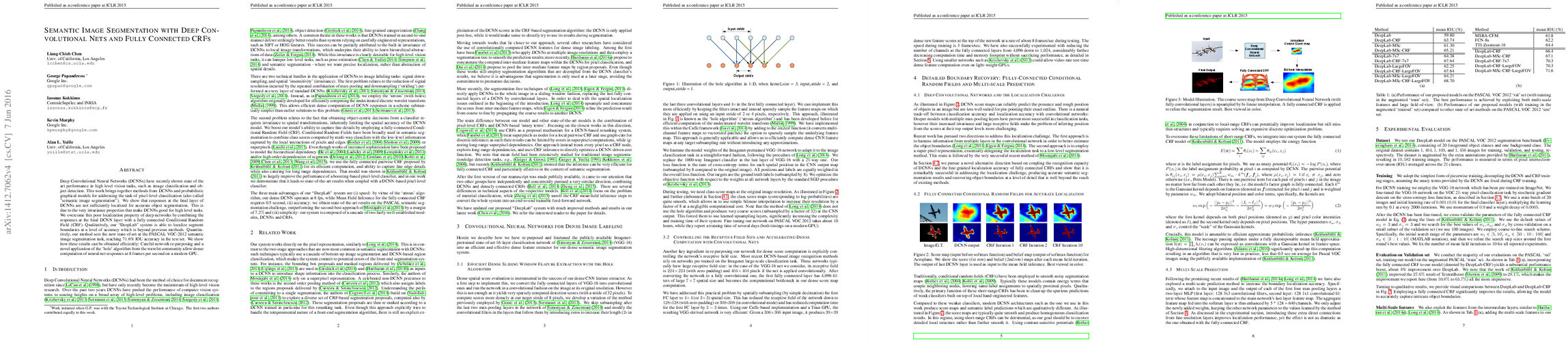
- Atrous Convolution: A technique that allows for control over the receptive field of convolutional layers without losing resolution, enabling denser feature extraction.
- Multi-Scale Prediction: A method that leverages features from various layers of a network to improve segmentation accuracy, particularly at object boundaries.
Prior Research:
- FCN-8s (2014): Introduced fully convolutional networks for semantic segmentation, achieving significant improvements in pixel-level classification.
- Krähenbühl & Koltun (2011): Developed efficient fully connected CRFs that improved segmentation by capturing long-range dependencies and fine details.
- Mostajabi et al. (2014): Proposed a zoom-out approach for segmentation that utilized multi-scale features but lacked the integration of CRFs for refinement.
Methodology
Key Ideas:
- DeepLab Architecture: Combines DCNNs with a fully connected CRF to produce detailed segmentation maps. The architecture utilizes atrous convolution to maintain high resolution and capture contextual information.
- Mean Field Inference: Employed for efficient CRF optimization, allowing for rapid refinement of segmentation outputs based on pixel relationships.
- Multi-Scale Feature Integration: Incorporates features from multiple layers of the DCNN to enhance boundary detection and overall segmentation accuracy.
Experiments:
- Evaluated on the PASCAL VOC 2012 dataset, using metrics such as mean Intersection over Union (IoU) to assess performance.
- Variants of the DeepLab model were tested, including DeepLab-CRF and DeepLab-MSc-CRF, which utilized multi-scale features.
- Performance comparisons were made against state-of-the-art models like FCN-8s and TTI-Zoomout-16.
Implications: The methodology allows for high-speed processing (8 frames per second) while achieving state-of-the-art segmentation accuracy, indicating a practical application in real-time systems.
Findings
Outcomes:
- The DeepLab-CRF model achieved a mean IoU of 66.4% on the PASCAL VOC 2012 test set, significantly outperforming previous methods.
- Incorporating multi-scale features and large field-of-view (FOV) further improved performance, with the best model reaching 71.6% mean IoU.
- The integration of CRFs enhanced boundary localization, capturing intricate details that DCNNs alone could not.
Significance: This research demonstrates the effectiveness of combining DCNNs with CRFs, setting a new benchmark in semantic segmentation tasks and addressing the limitations of existing models.
Future Work: Suggestions include refining the integration of DCNNs and CRFs for end-to-end training, exploring applications in different datasets, and investigating weakly supervised learning techniques.
Potential Impact: Advancements in this area could lead to improved performance in various computer vision applications, including autonomous driving, medical imaging, and augmented reality, where precise segmentation is crucial.